
FD-B1445

产品技术参数
①操作简单、结构简洁、速度快、机器人的性能能得到进一步的提高;
②保养简单、维修方便、系统构建的成本低、性能高;
| 型号 | FD-B145 | |
| 构造 | 垂直多关节型 | |
| 轴数 | 6轴 | |
| 位置重复精度 | ±0.08mm | |
| 驱动系统 | 交流伺服电机 | |
| 驱动能力 | 2900W | |
| 位置反馈 | 绝对值编码器 | |
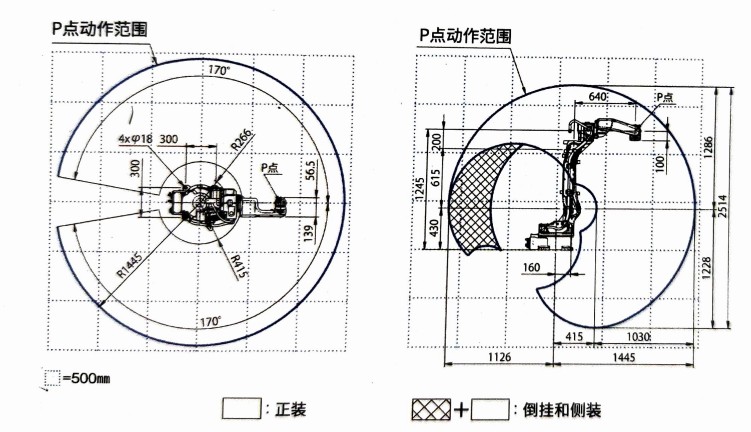
| 动作范围 | 基本轴J1 | ±170°(±50°) |
| 基本轴J2 | ﹣155°~﹢90° | |
| 基本轴J3 | ﹣170°~﹢245° | |
| 手臂轴J4 | ±155°(±170°) | |
| 手臂轴J5 | ﹣45°~﹢225° | |
| 手臂轴J6 | ±205°(±360°) | |
| 最高速度 | 基本轴J1 | 2.97rad/s{170°/s}(2.27rad/s{130°/s}) |
| 基本轴J2 | 2.97rad/s{170°/s} | |
| 基本轴J3 | 2.97rad/s{170°/s} | |
| 基本轴J4 | 4.89rad/s{280°/s} | |
| 基本轴J5 | 4.19rad/s{240°/s} | |
| 基本轴J6 | 9.08rad/s{520°/s} | |
| 腕部允许负载 | 允许力矩J4 | 10.1N·m |
| 允许力矩J5 | 10.1N·m | |
| 允许力矩J6 | 2.9N·m | |
| 允许惯性矩J4 | 0.38kg·m² | |
| 允许惯性矩J5 | 0.38kg·m² | |
| 允许惯性矩J6 | 0.03kg·m² | |
| 机器人动作范围 | 3.57m²x340° | |
| 使用环境条件 | 温度:0~45°C、湿度:20~80%RH(无结露) | |
| 本体重量 | 145kg | |
| 上臂可载能力 | 10kg | |
| 安装方式 | 地面/壁挂/倒挂 | |
| 安装方式 | 红褐色 | |